1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
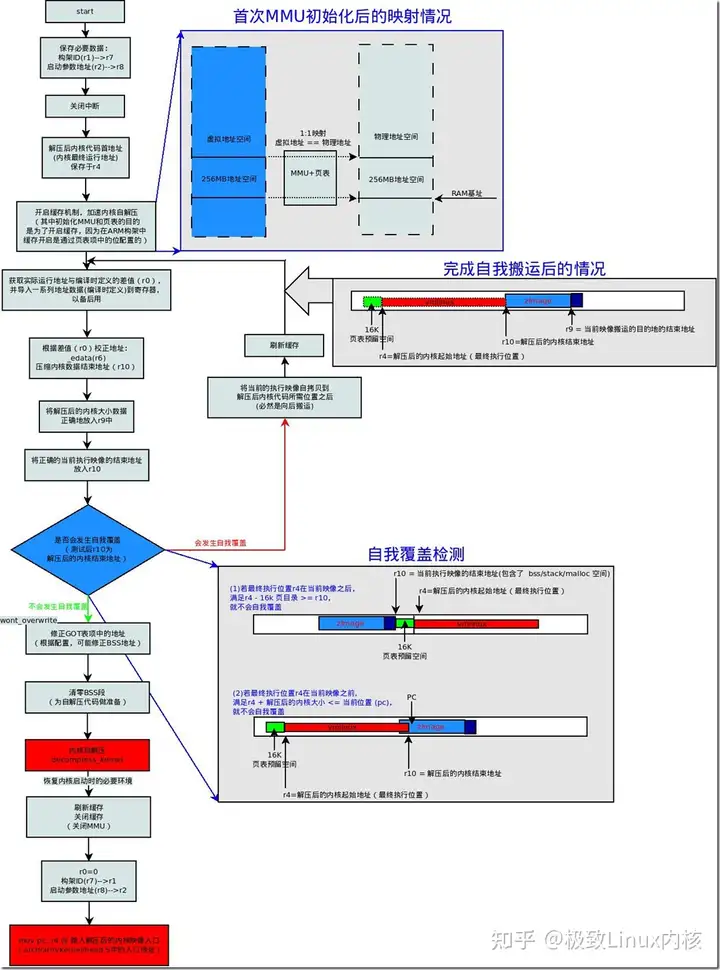
| 1: .section ".start", #alloc, #execinstr
2: /*
3: * 清理不同的调用约定
4: */
5: .align
6: .arm @ 启动总是进入ARM状态
7: start:
8: .type start,#function
9: .rept 7
10: mov r0, r0
11: .endr
12: ARM( mov r0, r0 )
13: ARM( b 1f )
14: THUMB( adr r12, BSYM(1f) )
15: THUMB( bx r12 )
16: .word 0x016f2818 @ 用于boot loader的魔数
17: .word start @ 加载/运行zImage的绝对地址(编译时确定), 在vmlinux.lds中可以看到,zImage的链接起始地址是0
18: .word _edata @ zImage结束地址,分析vmlinux.lds可以看到,_edata是 .got 段的结束地址,后面紧接的就是.bss段和.stack段
19: THUMB( .thumb )
20: 1: mov r7, r1 @ 保存构架ID到r7(此前由bootloader放入r1)
21: mov r8, r2 @ 保存内核启动参数地址到r8(此前由bootloader放入r2)
22: #ifndef __ARM_ARCH_2__
23: /*
24: * 通过Angel调试器启动 - 必须进入 SVC模式且关闭FIQs/IRQs
25: * (numeric definitions from angel arm.h source).
26: * 如果进入时在user模式下,我们只需要做这些
27: */
28: mrs r2, cpsr @ 获取当前模式
29: tst r2, #3 @ 判断是否是user模式
30: bne not_angel
31: mov r0, #0x17 @ angel_SWIreason_EnterSVC
32: ARM( swi 0x123456 ) @ angel_SWI_ARM swi会产生软中断,会跳入中断向量表,这个向量表用的是bootloader的,因为在head.S中并没有建立新的向量表
33: THUMB( svc 0xab ) @ angel_SWI_THUMB
34: not_angel:
35: mrs r2, cpsr @ 关闭中断
36: orr r2, r2, #0xc0 @ 以保护调试器的运作 关闭IRQ和FIQ
37: msr cpsr_c, r2
38: #else
39: teqp pc, #0x0c000003@ 关闭中断(此外bootloader已设置模式为SVC)
40: #endif
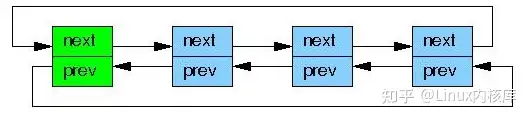
GOT表是什么?
GOT(Global Offset Table)表中每一项都是本运行模块要引用的一个全局变量或函数的地址。可以用GOT表来间接引用全局变量、函数,也可以把GOT表的首地址作为一个基准,用相对于该基准的偏移量来引用静态变量、静态函数。
更多介绍请参考:
http://blog.sina.com.cn/s/blog_54f82cc201011oqy.html
http://blog.sina.com.cn/s/blog_54f82cc201011oqv.html
接着分析head.S
1: /*
2: * 注意一些缓存的刷新和其他事务可能需要在这里完成
3: * - is there an Angel SWI call for this?
4: */
5: /*
6: * 一些构架的特定代码可以在这里被连接器插入,
7: * 但是不应使用 r7(保存构架ID), r8(保存内核启动参数地址), and r9.
8: */
9: .text
10: /*
11: * 此处确定解压后的内核映像的绝对地址(物理地址),保存于r4
12: * 由于配置的不同可能有的结果
13: * (1)定义了CONFIG_AUTO_ZRELADDR
14: * ZRELADDR是已解压内核最终存放的物理地址
15: * 如果AUTO_ZRELADDR被选择了, 这个地址将会在运行是确定:
16: * 将当pc值和0xf8000000做与操作,
17: * 并加上TEXT_OFFSET(内核最终存放的物理地址与内存起始的偏移)
18: * 这里假定zImage被放在内存开始的128MB内
19: * (2)没有定义CONFIG_AUTO_ZRELADDR
20: * 直接使用zreladdr(此值位于arch/arm/mach-xxx/Makefile.boot文件确定)
21: */
22: #ifdef CONFIG_AUTO_ZRELADDR
23: @ 确定内核映像地址
24: mov r4, pc
25: and r4, r4, #0xf8000000
26: add r4, r4, #TEXT_OFFSET
27: #else
28: ldr r4, =zreladdr 以我的板子为例,它的值是0x80008000,即它的物理内存起始地址是0x80000000
29: #endif
30: bl cache_on /* 开启缓存(以及MMU) */ 关于cache_on这部分,我在这里就不分析了
31: restart: adr r0, LC0 获取LC0的运行地址,而不是链接地址
32: ldmia r0, {r1, r2, r3, r6, r10, r11, r12}
/*
依次将LC0的链接地址放入r1中,bss段的链接起始和结束地址__bss_start和_end分别放入r2和r3中
_edata的链接地址放入r6中,piggy.gz的倒数第四个字节的地址放入r10中, got表的起始和结束链接地址分别放入r11和r12中
*/
33: ldr sp, [r0, #28] 此时r0中存放的还是LC0的运行地址,所以加28后正好是LC0数组中的.L_user_stack_end的值(栈的结束地址),他在head.S的结尾定义
reloc_code_end:
.align
.section ".stack", "aw", %nobits
.L_user_stack: .space 4096
.L_user_stack_end:
34: /*
35: * 我们可能运行在一个与编译时定义的不同地址上,
36: * 所以我们必须修正变量指针
37: */
38: sub r0, r0, r1 @ 计算偏移量 编译地址与运行地址的差值,以此来修正其他符号的地址
39: add r6, r6, r0 @ 重新计算_edata 获得_edata的实际运行地址
40: add r10, r10, r0 @ 重新获得压缩后的内核大小数据位置 获取Image大小存放的实际物理地址
41: /*
42: * 内核编译系统将解压后的内核大小数据
43: * 以小端格式
44: * 附加在压缩数据的后面(其实是“gzip -f -9”命令的结果)
45: * 下面代码的作用是将解压后的内核大小数据正确地放入r9中(避免了大小端问题)
46: */
47: ldrb r9, [r10, #0] 以我们的例子,此时r9为0x84
48: ldrb lr, [r10, #1] lr为 0xDA
49: orr r9, r9, lr, lsl #8 r9为0xDA84
50: ldrb lr, [r10, #2] lr为0x67
51: ldrb r10, [r10, #3] r10是0x00
52: orr r9, r9, lr, lsl #16 r9为0x67DA84
53: orr r9, r9, r10, lsl #24 r9是0x0067DA84
54: /*
55: * 下面代码的作用是将正确的当前执行映像的结束地址放入r10
56: */
57: #ifndef CONFIG_ZBOOT_ROM
58: /* malloc 获取的内存空间位于重定向的栈指针之上 (64k max) */
59: add sp, sp, r0 使用r0修正sp,得到堆栈的实际结束物理地址,为什么是结束地址?因为栈是向下生长的
60: add r10, sp, #0x10000 执行这句之前sp中存放的是栈的结束地址,执行后,r10中存放的是堆空间的结束物理地址
61: #else
62: /*
63: * 如果定义了 ZBOOT_ROM, bss/stack 是非可重定位的,
64: * 但有些人依然可以将其放在RAM中运行,
65: * 这时我们可以参考 _edata.
66: */
67: mov r10, r6
68: #endif
69: /*
70: * 检测我们是否会发生自我覆盖的问题
71: * r4 = 解压后的内核起始地址(最终执行位置) 在我们的例子中r4就是0x80008000
72: * r9 = 解压后内核的大小 即arch/arm/boot/Image的大小,0x67DA84
73: * r10 = 当前执行映像的结束地址, 包含了 bss/stack/malloc 空间(假设是非XIP执行的), 上面已经分析了r10存放的是堆空间的结束地址
74: * 我们的基本需求是:
75: * (若最终执行位置r4在当前映像之后)r4 - 16k 页目录 >= r10 -> OK
76: * (若最终执行位置r4在当前映像之前)r4 + 解压后的内核大小 <= 当前位置 (pc) -> OK
77: * 如果上面的条件不满足,就会自我覆盖,必须先搬运当前映像
78: */
79: add r10, r10, #16384
80: cmp r4, r10 @ 假设最终执行位置r4在当前映像之后
81: bhs wont_overwrite
82: add r10, r4, r9 @ 假设最终执行位置r4在当前映像之前
83: ARM( cmp r10, pc ) @ r10 = 解压后的内核结束地址,注:这里的r4+r9计算出的大小并不包含栈和堆空间
84: THUMB( mov lr, pc )
85: THUMB( cmp r10, lr )
86: bls wont_overwrite
|